Overview
All the source codes are in the ugv_stereo GitLab workspace. They are tagged with final version. The core modules include:
SSLAM package is an optimization-based multi-sensor (mainly stereo camera) state estimator, which achieves accurate self-localization and map management for autonomous applications.
Cubicle Detection package handles stereo matching for range estimation, obstacle detection, object classification and tracking, using Darknet as backend.
LaneKerb Detection package achieves real-time lane and kerb detection under various road scenarios and diverse weather conditions.
Cubicle Merge package handles the mapping functionality. It merges the object tracking output with localization 6D pose output.
Calibration package convert the Matlab calibration in to the desired format for this application.
Platform
Ubuntu 16.04 or above. Fully tested under Ubuntu 16.04.
ROS envrionment.
System Diagram
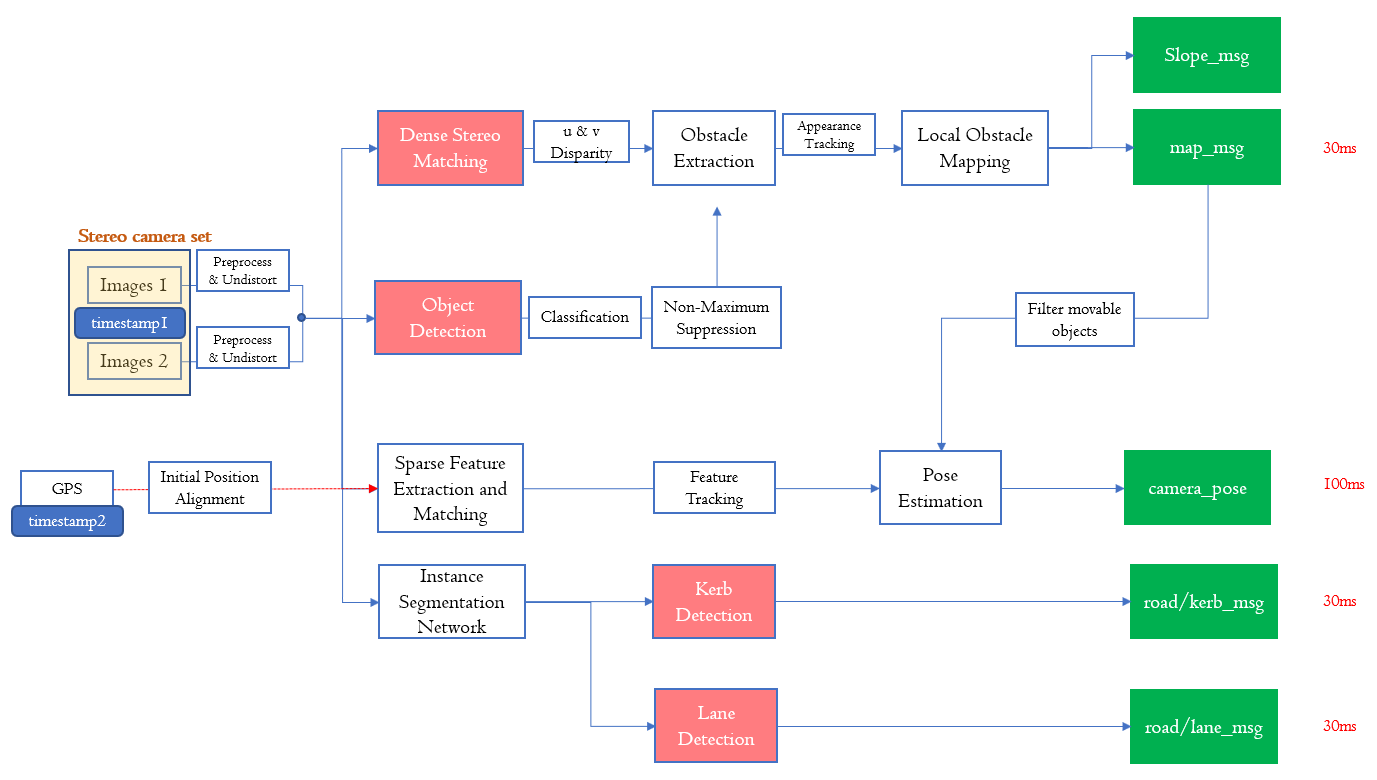
Fig. 1 System Flow Chart.
Executive Summary of different modules
Module |
Theory |
Dependencies |
Latency (ms) |
|---|---|---|---|
SSLAM |
|
OpenCV
Ceres-solver
Cereal
|
100 |
Cubicle
Detection
|
|
OpenCV
Darknet with CUDA
|
40 |
Curb & Lane
Detection
|
|
Tensorflow 1.10 |
30 |
Cubicle Merge |
30 |